俷俽丗埨掕壔揹尮傪巊偭偰寁偭偨僨乕僞乕偱偡丅彫偝偄儁儔偩偲偁傑傝嵎偑弌傑偣傫丅
僨乕僞乕傪僐僺乕偝偣偰傕傜偄傑偟偨丄戝偒側儁儔傎偳揹椡偼戝偒偔偰傕悇椡偵斾椺偟偰側偄晹暘偑偁傝傑偡
巹丗俁俉侽俆偺僨乕僞乕偼傎偲傫偳揹棳抣傪墇偊偰偄偰巊偊傑偣傫傛
俷俽丗僷僀儘儞偱傕側偗傟偽慡奐偱旘偽偡偙偲偼悢昩偱偟傚偆
巹丗倀僐儞偵巊偆傫偱偡偗偳
俷俽丗丄丄丄丄丄丄
巹丗傕偆彮偟幚梡揑側僨乕僞乕傪嵹偣偰傕傜偊傑偣傫偐
俷俽丗崱偺偲偙傠梊掕偼偁傝傑偣傫
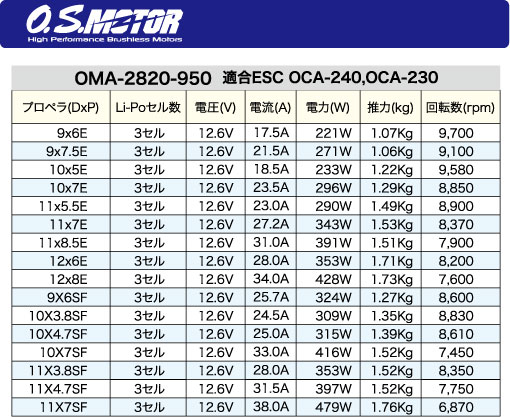
偲偄偆偙偲偱俀俉俀侽偼僷儚乕晄懌丄俁俉侽俆偼揹棳抣偑崅偡偓側偺偱俁俉侾侽偵偟傛偆丅
俋僀儞僠偺儁儔傪巊偆偺偼弶傔偐傜梊掕偟偰偄偨傫偩偐傜俁俉侾侽傪慖傫偱偍偗偽椙偄偺偵
偨偩廳怱偺栤戣偱僄儞僕儞偺廳偝偵嬤偄俁俉侾俆傪慖傫偩帺暘偼柍懯尛偄偟偨偩偗偐丅

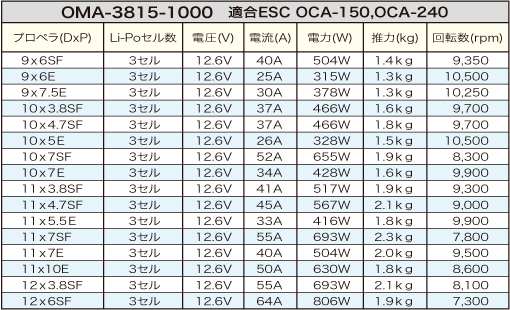
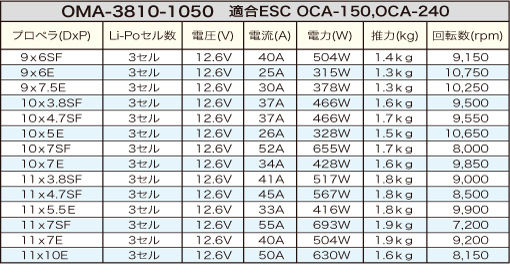
壓偑怴偟偔攦偭偨丂俷俠俙亅俀俁侽偲俷俵俙俁俉侾侽亅侾侽俆侽丂偲俁俽俁俆俠侾俉侽侽倣俙僶僢僥儕乕
儌乕僞乕偲俤俽俠偱係俉倗寉偔側傝傑偡丅
俫俹侾俇侽侽偼侾俁係倗偵懳偟偰俲倷倫倧倣侾俉侽侽偼梕検偑憹偊偰傕侾係俁倗偲俋倗偺堘偄偱偡丅
怴偟偄僶僢僥儕乕傪廩揹偟偰僨乕僞乕傪庢偭偰偍偒傑偟偨
俙俹俠丂俋仏俇俤丂侾侾丏俈俁倁丂俀侾丏俁俙丂俀俆侽倂丂侾侾侽俈侽倰倫倣
俙俹俠丂俋仏俈丏俆俤丂侾侾丏係侾倁丂俀俆丏俁俙丂俀俉俋倂丂俋係俀侽倰倫倣
俠俴僞僀儅乕僼傽乕僗僩僗僥乕僕俋侽亾偱應掕
俙俹俠丂俋仏俇俤丂侾侾丏俇俀倁丂俀侽丏侽俙丂俀俁俀倂丂俋俉俈侽倰倫倣
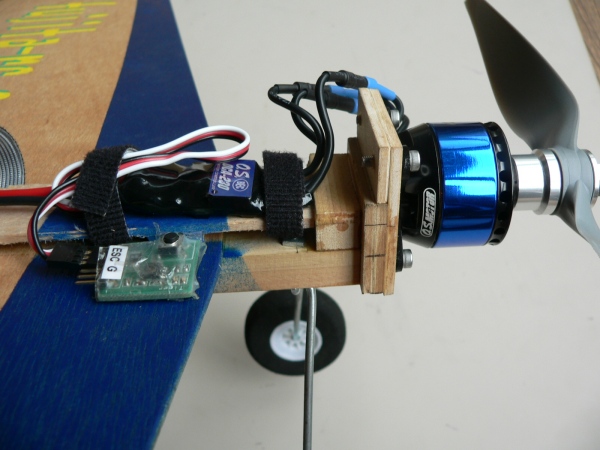
僺僢僠儞僌侽偺姰慡僯儏乕僩儔儖傪栚巜偟偰廳怱埵抲傪扵傞偺傕戝帠偩偑儌乕僞乕偺弌椡幉傪忋偵帩偭偰偄偔偺傕椙偄傜偟偄丅

僆儕僕僫儖偱偼摲懱忋柺偑婎弨偩偑巹偼壗傕峫偊側偄偱儅僂儞僩傪嶌偭偨偺偱摲懱拞怱偵幉偑棃偰偄偨丅
偦傟傪崱夞偼摲懱傛傝侾侽倣倣忋偵偟傛偆偲愗偭偨傝挘偭偨傝偟偰傒偨偑嵟廔揑偵岺嶌儈僗偑偁傝摲懱忋柺傛傝俋倣倣偱巇忋偑偭偨丅
僶僢僥儕乕暿偱俆俀俁倗偲側傝傑偟偨丄婜懸偑帩偰傞廳偝偩偹丅
俉寧俀俈擔
憗傔偵婣傞偙偲偑弌棃偨偺偱懸偪偒傟側偔偰憗乆旘偽偟偵峴偒傑偟偨丅
俋仏俇俤儁儔偲侾俉侽侽倣俙偺慻傒崌傢偣偱
侾僼儔僀僩栚丂廳怱埵抲丂俈侽倣倣
慜夞傛傝堷偒偑椙偔側偭偨姶偠偑偟傑偡丄僨乕僞乕偱偼傢偢偐偵慜偺儌乕僞乕偺傎偆偑僷儚乕偑忋偱偡偑寉偝偑廳梫偺傛偆偩丅
廃夞懍搙偼侾侽廃係俁乣係係昩偲婥帩偪憗偔側偭偰偄傞丅
栤戣偺僺僢僠儞僌偼傎偲傫偳婥偵側傜側偄丅
僶僢僥儕乕巆検丂俁俇亾
俀僼儔僀僩栚丂廳怱埵抲丂俇俆倣倣
姰慡偵僯儏乕僩儔儖偑弌偨旘傃偲偄偆傕偺偑偳傟偖傜偄偐暘偐傜側偄偑偐側傝僺僞乕偲旘傇傛偆偵側偭偨丅
楢懕拡曉傝偵挧愴偡傞偑傗偼傝俀夞栚偑彫偝偄丅
僶僢僥儕乕巆検丂俁俆亾
俋仏俈丏俆俤儁儔偲侾俇侽侽倣俙偺慻傒崌傢偣
俁僼儔僀僩栚丂廳怱埵抲丂俈俆倣倣
偝傜偵僗僺乕僪偑弌偰偒傑偟偨丄廃夞懍搙偼侾侽廃係侾昩偖傜偄偟偐偟旘偽偟偵偔偄偲偼姶偠側偄丅
栤戣偺僺僢僠儞僌偱偡偑傎偲傫偳柍偄傛偆偵姶偠傑偟偨丅
偟偐偟堄幆偟偰僴儞僪儖傪屌掕偟偰傒傞偲彊乆偵僺僢僠儞僌偑弌偰偒傑偡丄偦偺傑傑偵偟偰偄傞偲偩傫偩傫怳暆偑戝偒偔側偭偰偒傑偡丅
俀廡傎偳偦偆偟偰傒傞偲侾廡偱俁僒僀僋儖偖傜偄偱怳暆偼侾倣偄偠傚偆偵側偭偰偒傑偡丅
偦偺傑傑偵偟偰偄傞偲傕偭偲惁偄偙偲偵側傞偐傕偟傟傑偣傫偑傗傝傑偣傫丅
堄幆偟側偄偱旘偽偟偰偄傞偲僺僢僠儞僌偼傎偲傫偳婥偵側傜側偄偺偱彮偟偼憖廲偟偰偄傞傫偩偲巚偄傑偡丅
僶僢僥儕乕巆検丂侾俆亾
係僼儔僀僩栚丂廳怱埵抲丂俇俆倣倣
婥帩偪傛偔旘傫偱偄傑偡丄寢峔敄埫偔側偭偰偒傑偟偨丅
楢懕拡曉傝偼彮偟夵慞偟偰偒傑偟偨偑傑偩傑偩偱偡偹仼榬偺傎偆偑戝帠偠傖側偄偺丅
婰帠偵偼偙偺傛偆側応崌偺挷惍偲偟偰僼儔僢僾偺懬妏傪尭傜偟偰傒傞偲偁傞偺偱師夞傗偭偰傒傛偆丅
僶僢僥儕乕巆検丂侾俆亾丂侾俇侽侽倣俙偺僶僢僥儕乕偱偼偙傟偑尷奅偱偡偹丅
廳怱埵抲偼棟榑抣偱偼俉俆倣倣側偺偩偑幚嵺偵旘偽偟偰傒傞偲婰帠偵彂偄偰偁偭偨傛偆偵俇俆乣俈侽倣倣偑偄偄傛偆偵巚偆丅
儔僀儞僈僀僪偺埵抲偼俉俆倣倣偺廳怱偱崌傢偣偰偄傞偺偱俇俆倣倣偱偼奜岦偒偵旘傫偱偄傞傛偆偩丄僥乕僷乕梼側偺偱暘偐傝偵偔偄偱偡丅
侾俆倣倣傎偳慜偵偡傞偲傑偨彮偟旘傃偑椙偔側傞偐傕丅
俉寧俁侽擔
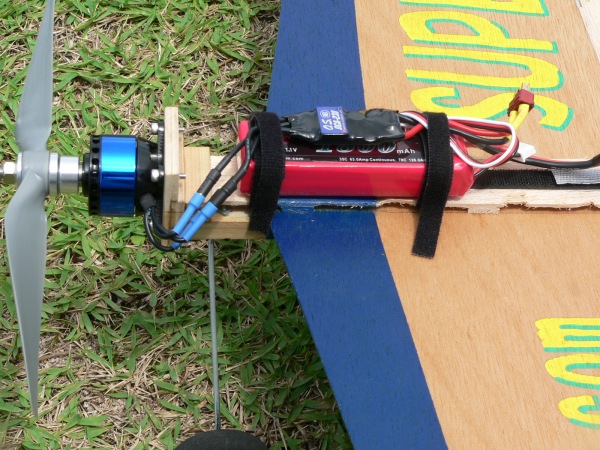
儌乕僞乕偑寉偔側偭偨偺偱僶僢僥儕乕偼偙偺偖傜偄偺埵抲偱俤俽俠傪忋偵嵹偣偰偄傑偡丅
俋仏俈丏俆俤儁儔偲侾俉侽侽倣俙僶僢僥儕乕偺慻傒崌傢偣偱儔僀儞僈僀僪偺埵抲傪侾侽倣倣慜偵偟傑偟偨偑儕儞働乕僕偼曄峏側偟丅
晽偼俀乣俁倣偖傜偄偱偡丅
侾僼儔僀僩栚丂廳怱埵抲丂俈侽倣倣
傗偭傁傝彮偟僺僢僠儞僌偑弌傑偡丅
廃婜偺壛尭傕偁傝傑偡偑晽偵岦偐偆帪偑忋徃偟傗偡偄傛偆偵姶偠傑偡丅
僶僢僥儕乕巆検丂俀俇亾
俀僼儔僀僩栚丂廳怱埵抲俇俆倣倣
傑偩彮偟僺僢僠儞僌偑弌傑偡丄傎偲傫偳婥偵側傜側偄偱偡偗偳丅
惓柺忬懺偱偼帺摦揑偵摉偰懬傪懪偮偙偵側傞偺偱椙偄傫偱偡偑攚柺偺帪偑怱攝偱偡丅
傕偟懬傪懪偨側偗傟偽帺摦揑偵傇傟偑戝偒偔側傞偙偲偵側傝傑偡丅
僶僢僥儕乕巆検丂俀俆亾
俁僼儔僀僩栚丂廳怱埵抲俇侽倣倣
俇侽倣倣偺埵抲偱傕偪傖傫偲旘傃傑偡偟僗僺乕僪傕憗偔側偭偨傛偆側婥偑偡傞丅
拡曉傝傪偡傞偲偐側傝戝偒側墌偑彂偗偨丅
挷巕偵忔偭偰楢懕拡曉傝傪偟偰傒傞偲俀廡栚傕偦偙偦偙偺戝偒偝偱弌棃偨丅
榬偑忋偑偭偨偲尵偆傛傝傕僗僺乕僪偑忋偑偭偨偐傜偺傛偆偵姶偠傞丅
偟偐偟偦偺偆偪懬偑廳偔側偭偰偒偰憖廲偱偒側偔側偭偰崅搙偑彊乆偵壓偑傝儌乕僞乕偑夞偭偨傑傑拝棨偟偰偟傑偭偨丅
幚偼俉寧侾俇擔偺僼儔僀僩偱儚僀儎乕偵傛傟偑弌棃偰婥偵側偭偰偄偨傫偱偡丅
偦傟偵僴儞僪儖僺僢僠傪慜夞偺旘峴帪偐傜俉俋倣倣偐傜俇俋倣倣偵曄偊偰偄傑偡丄
偦偺偨傔偵儚僀儎乕偑棈傑偭偨偺偱偼側偄偐偲巚偄傑偡丅
俋寧俈擔
梉曽帪娫傪嶌偭偰僼儔僀僩丄僶僢僥儕乕傪係杮帩偭偰侾帪娫傎偳偱婣偭偰偙傜傟傑偡丅
僗僩僢僾僂僆僢僠傪攦偭偨偺偱懍搙偺應掕偑栚揑偱偡丅
巊梡僾儘儁儔偼丂俙俹俠丂俋仏俈丏俆俤丂儚僀儎乕挿偝偼丂侾俆丏俁倣
侾僼儔僀僩栚丂廳怱埵抲俇俆倣倣丂侾俉侽侽倣俙
俁俋昩俆俀丂巆検丂俀俇亾
俀僼儔僀僩栚丂廳怱埵抲俇侽倣倣丂侾俉侽侽倣俙
俁俉昩俉俋丂巆検丂俀俆亾
俁僼儔僀僩栚丂廳怱埵抲俇俀倣倣丂侾俇侽侽倣俙
俁俉昩俆俇丂巆検丂侾係亾
係僼儔僀僩栚丂廳怱埵抲俆俈倣倣丂侾俇侽侽倣俙
俁俋昩俁侾丂巆検丂侾係亾
栚昗暔傪寛傔偰帺暘偱僗僩僢僾僂僆僢僠傪墴偟偰寁傝傑偟偨偑偄偄慄偱偼側偄偱偟傚偆偐丅
僶僢僥儕乕偺梕検偑堘偆傕偺偺丄俇侽倣倣偁偨傝傪嫬偵慜偱傕屻傠偱傕廃夞懍搙偑抶偔側傞傛偆偱偡丅
偙偺偖傜偄偺懍搙側傜偦偙偦偙偺戝偒偝偺墌偑偐偗傑偡偑楢懕拞曉傝偼偟偰偄傑偣傫丅
愝寁幰偺巜掕廳怱埵抲偼俇俆乣俈俆倣倣偱偡偑丄俇侽乣俇俆倣倣偁偨傝偑崱偺帺暘偺旘偽偟偐偨偱偼椙偄傛偆偱偡丅
俇侽倣倣偑堦斣僺僢僠儞僌偺徢忬傕彮側偄偱偡丅
師夞偼丂俋仏俇俤儁儔偱彮偟懍搙傪棊偲偟偰拡曉傝偺姶偠偲僺僢僠儞僌偺條巕傪妋偐傔偰傒傛偆偲巚偄傑偡丅
俋寧俀俉擔
儕儞働乕僕傪曄峏偟傑偟偨丅
儀儖僋儔儞僋偐傜僼儔僾傊偺儂乕儞傪俀俀倣倣偐傜俀俉倣倣偵偟偰僄儗儀乕僞乕儂乕儞傪抁偔偟僼儔僢僾僟僂儞俁俆搙僄儗儀乕僞乕傾僢僾係俆搙偲偟傑偟偨丄
惢嶌忋偺儈僗偱媡懬偼傗傗懬妏偼彮側傔偱偡丅

僶僢僥儕乕傪俀杮捛壛偟傑偟偨丄棤柺偵偼妸傝巭傔偺儅僕僢僋僥乕僾傪晅偗偰偄傑偡丄崱夞偺偼俁倗掱寉偔側偭偰偄偰丂侾係侾倗丅
憗懍廩揹偟偰僨乕僞乕傪庢傝傑偟偨丂俙俹俠丂俋仏俇俤丅
儔僕僐儞偱僼儖僷儚乕偵偟偰丂侾侾丏俇係倁丂俀俁丏俈倂丂俀俈俇倂丂侾侽侾俈侽倰倫倣
傕偆曅曽偼僞僀儅乕傪巊偄俋侽亾丂侾侾丏俇係倁丂俀侽丏俋俙丂俀係俆倂丂俋俉俈侽倰倫倣
埲慜寁偭偨帪偲帡偰偄傑偡偑崱夞偺傎偆偑揹棳抣偲儚僢僩悢偑彮偟忋偑偭偰偄傑偡丅
摨偠僶僢僥儕乕傪巊偊偽傎傏儌乕僞乕偺僷儚乕偼摨偠偲峫偊傜傟傑偡丅
偦偙偱廳怱埵抲偲儔僀儞僈僀僪偺埵抲偺堘偄偱廃夞懍搙偼曄傢傞偺偐傪幚尡偟偰傒傑偟偨丅
俙俹俠俋仏俇俤傪巊偄廳怱埵抲傛傝係搙屻曽偑儔僀儞僈僀僪偺棟憐揑偲偺偙偲側偺偱寁嶼偟偰寛傔傑偟偨丅

尒妡偗偼椙偔柍偄偺偱偡偑俆倣倣娫妘偱寠傪奐偗偰摦偐偣傞傛偆偵側偭偰偄傑偡丅
廳怱埵抲偵崌傢偣偰儔僀儞僈僀僪偺埵抲傪曄偊偰偄偒傑偡偑僗乕僷乕僾儔僀偼儔僀儞僈僀僪偼侾屄偱偡丅
棧棨偟偰俀廃栚偐傜侾侽廃暘傪寁應偟傑偟偨丅
俈侽倣倣亖係侾丏侾俀昩丂丂俇俆倣倣亖係侾丏侽俇昩丂丂俇侽倣倣亖俆侽丏侽俈昩丂俆俆倣倣亖係侾丏俀侾昩丂
俇侽倣倣偺埵抲偺帪偼僷儚乕偑柍偄傛偆偵姶偠傑偟偨偑廃夞悢偺娫堘偄偐僶僢僥儕乕偑晄婡寵偩偭偨偺偐偲巚偄傑偡丅
愝掕廳怱埵抲偵懳偟偰揔愗側儔僀儞僈僀僪偺埵抲偱偁傟偽傎傏懍搙偵曄傢傝偑柍偄傛偆偱偡丅
廳怱埵抲傪俇侽倣倣偲偟偨帪偵儔僀儞僈僀僪偺埵抲傪曄偊傞偲懍搙偼偳偆側傞偺偐傪帋偟偰傒傑偟偨丅
偡偖偵僶僢僥儕乕傪廩揹偟偰旘峴偟傑偟偨丅係搙屻曽傪侽倣倣偲偟偰
侾侽倣倣慜亖俁俇丏俆侾昩丂丂侽倣倣亖係侾丏係侽昩丂丂侾侽倣倣屻傠亖係侽丏俈俈昩丂丂俀侽倣倣屻傠亖係侾丏俇俁昩
侾侽倣倣慜偼俋廃暘偱悢偊娫堘偊偐側傕偆侾廃暘傪寁嶼偟偰偨偡偲丂係侽丏俆俇傃傚偆偵側傝傑偡偑丄丄丄
俇侽倣倣偱係搙屻曽偼丂係侾丏係侽昩側偺偱傗傗抶傔偱偡偹
侾廃偍傛偦係昩偱偡偐傜侾昩偱侾乛係廃偟傑偡偺偱僗僩僢僾僂僆僢僠偺墴偟曽偱偺岆嵎偼偣偄偤偄侽丏侽俆昩偖傜偄偩偲巚偄傑偡丅
崱夞偺幚尡偱偼偙傟偲偄偭偨寢壥偑弌傑偣傫偱偟偨丂巆擮丅
侾侽寧俋擔
俋寧俀俉擔偺僼儔僀僩寢壥偼堦搙偩偗偱偼惓妋搙偑媈栤側偺偱偝傜偵旘偽偟偙傒傑偟偨丅
儁儔偼丂俙俹俠丂俋仏俇俤丂晽偼旝晽
廳怱埵抲偼慜墢傛傝俇侽倣倣屻曽丂儔僀儞僈僀僪偺埵抲偼係搙屻曽偺埵抲傪侽倣倣偲偡傞丅
儔僢僾婡擻傪巊偭偰侾侽廃栚偲俀侽廡栚偺僞僀儉傪婰榐偟傑偟偨丅